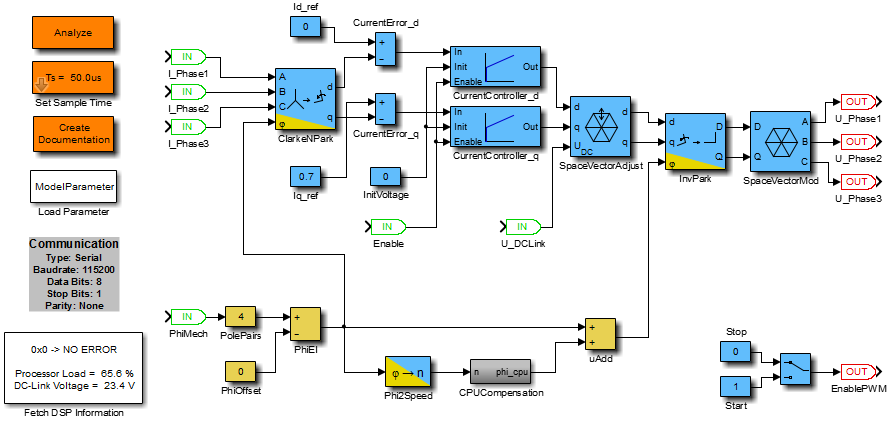
- X2C supports both Scilab/Xcos and Matlab/Simulink for building graphical control models.
- Control schemes are quickly and easily built by connecting predesigned blocks — no coding is needed.
- Within X2C, a variety of block libraries for Scilab/Xcos and Matlab/Simulink are available. In addition, custom blocks can be created as well.
- Based on the created model, C-code is automatically generated, which can then be compiled within the target’s integrated development environment (IDE).
- Generated code is easily readable.
- The “X2C Scope”, a virtual oscilloscope, is an intuitive tool for online data visualisation and debugging.
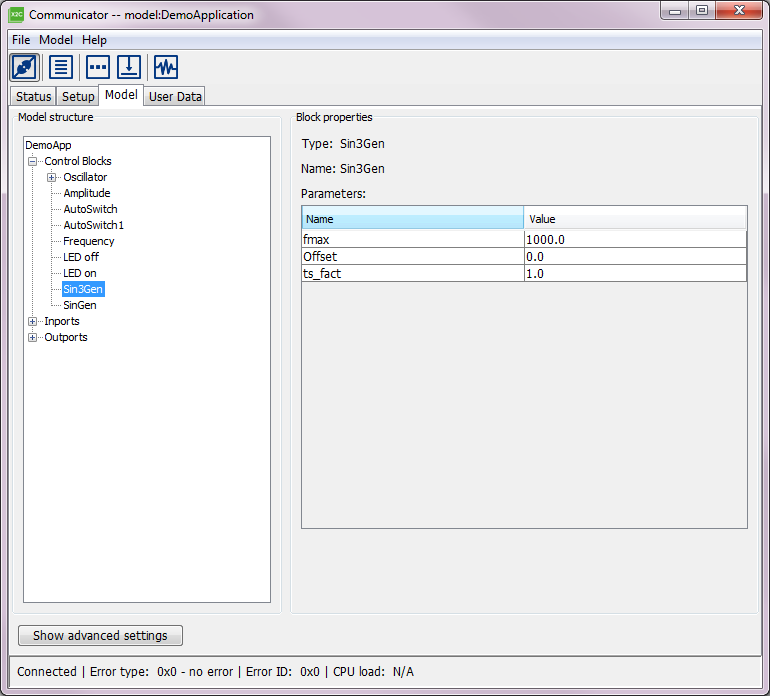
- The “X2C Communicator” allows application transfer to a target via serial, CAN or Ethernet communication. Furthermore, online parameter update from Simulink or Xcos is possible.
- Within the simulation environment, created algorithms can be validated without running them on the target.
- A report can be generated automatically with one mouse click.
- X2C enables automated control with Matlab, Scilab or Python scripts.
- X2C supports both Scilab/Xcos and Matlab/Simulink for building graphical control models.
- Control schemes are quickly and easily built by connecting predesigned blocks — no coding is needed.
- Within X2C, a variety of block libraries for Scilab/Xcos and Matlab/Simulink are available. In addition, custom blocks can be created as well.
- Based on the created model, C-code is automatically generated, which can then be compiled within the target’s integrated development environment (IDE).
- Generated code is easily readable.
- The “X2C Scope”, a virtual oscilloscope, is an intuitive tool for online data visualisation and debugging.
- The “X2C Communicator” allows application transfer to a target via serial, CAN or Ethernet communication. Furthermore, online parameter update from Simulink or Xcos is possible.
- Within the simulation environment, created algorithms can be validated without running them on the target.
- A report can be generated automatically with one mouse click.
- X2C enables automated control with Matlab, Scilab or Python scripts.
Intuitive development
For developing control algorithms, model-based design using X2C brings a number of clear advantages:
- It shortens the development time, as the model is built by modular and reusable blocks instead of manual coding.
- The blocks included with X2C are already tested, reducing the probability of errors significantly.
- The intuitive user interface and a convenient interconnection of tools make X2C easy to understand and quickly to master.
Intuitive development
For developing control algorithms, model-based design using X2C brings a number of clear advantages:
- It shortens the development time, as the model is built by modular and reusable blocks instead of manual coding.
- The blocks included with X2C are already tested, reducing the probability of errors significantly.
- The intuitive user interface and a convenient interconnection of tools make X2C easy to understand and quickly to master.
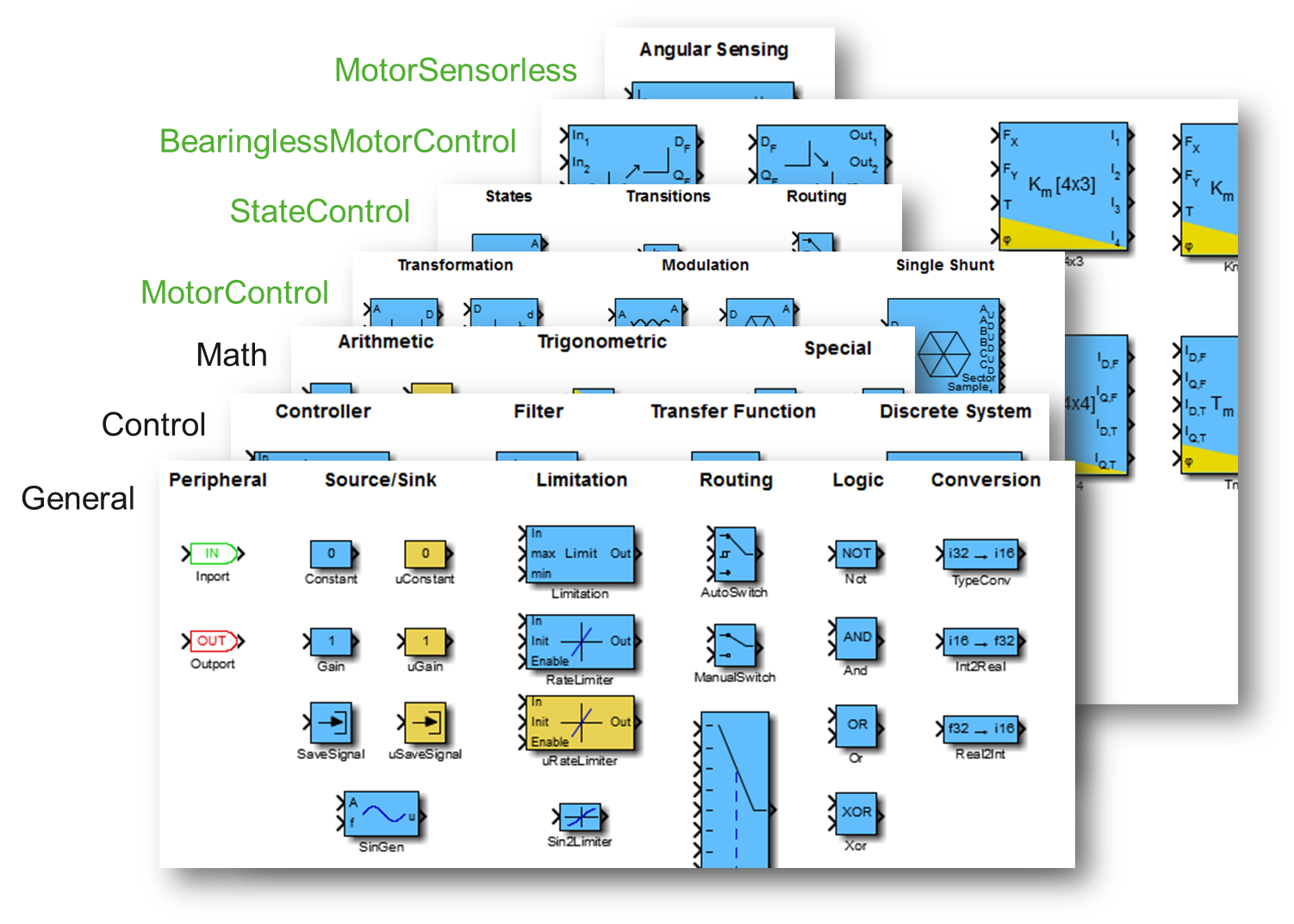
Extensive Libraries
Within X2C, extensive libraries for Xcos and Simulink (Basic, General, Math, Control, MotorControl, StateControl) are available.
- If custom blocks are required, they can easily be created using the “X2C Block Generator”.
- The block implementation (either fixed point 16/32 or floating point 32/64) is effortlessly defined using a drop-down menu. A mixture of various implementations within a model is possible.
- The chosen implementation is not restricted by the target’s hardware architecture.
Extensive Libraries
Within X2C, extensive libraries for Xcos and Simulink (Basic, General, Math, Control, MotorControl, StateControl) are available.
- If custom blocks are required, they can easily be created using the “X2C Block Generator”.
- The block implementation (either fixed point 16/32 or floating point 32/64) is effortlessly defined using a drop-down menu. A mixture of various implementations within a model is possible.
- The chosen implementation is not restricted by the target’s hardware architecture.
Communicator
The “X2C Communicator” is the central tool of X2C, which provides a variety of
helpful functions:
- It automatically generates C-code based on the graphical model.
- The “X2C Communicator” establishes a connection with the target via serial, CAN or Ethernet communication.
- The application can be transferred onto the target with a single mouse click.
- Furthermore, the “X2C Communicator” allows effortless online tuning and debugging.
Communicator
The “X2C Communicator” is the central tool of X2C, which provides a variety of
helpful functions:
- It automatically generates C-code based on the graphical model.
- The “X2C Communicator” establishes a connection with the target via serial, CAN or Ethernet communication.
- The application can be transferred onto the target with a single mouse click.
- Furthermore, the “X2C Communicator” allows effortless online tuning and debugging.
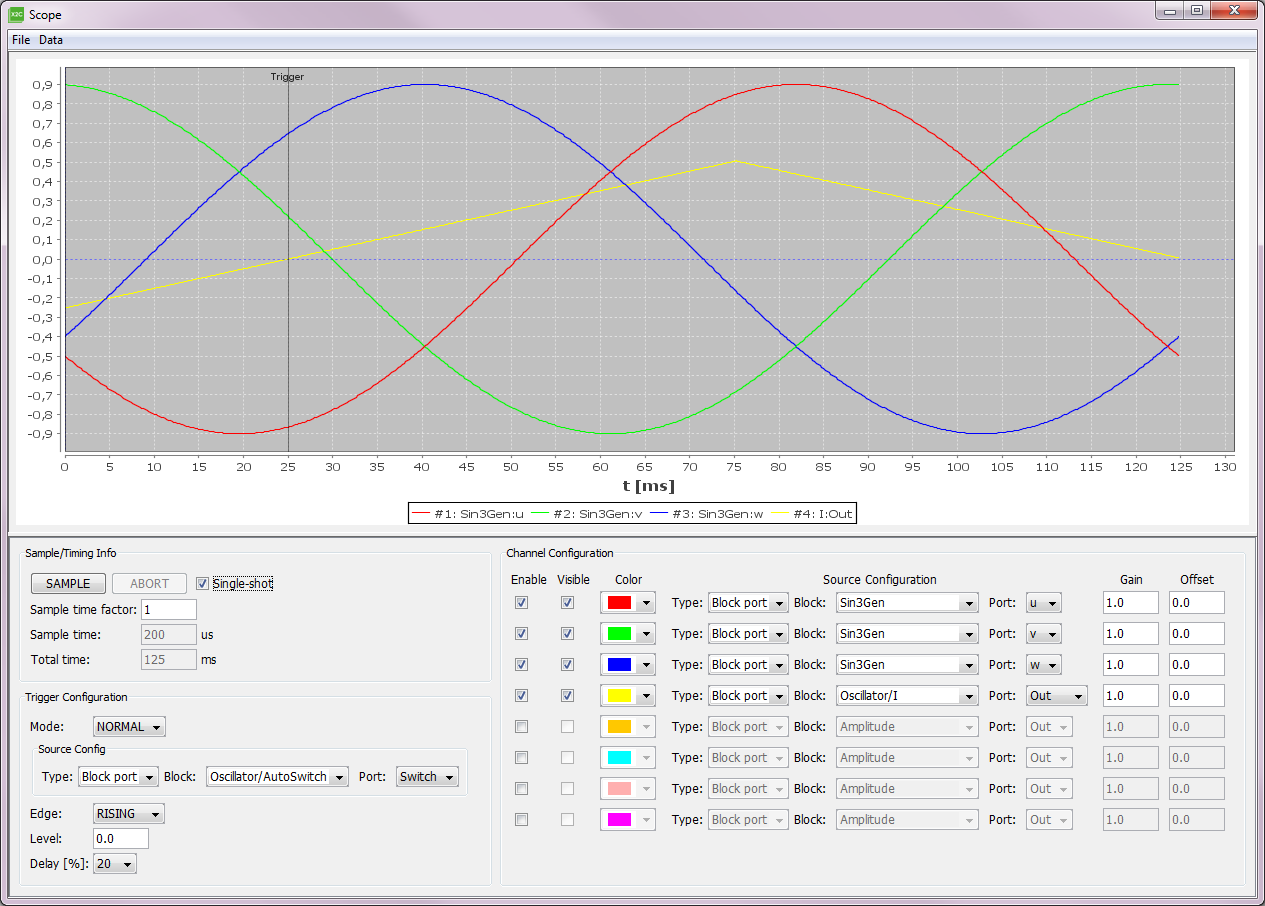
Scope
The “X2C Scope” is a convenient visualisation tool for real time monitoring system
signals in an oscilloscope-like environment.
- Block input and output signals, global variables or even memory addresses can be monitored.
- No recompiling of the software is required to change the monitored signals — all changes in the settings can be made at runtime.
- All functionalities known from an oscilloscope are available, including various sampling and trigger modes.
- To ease interpretation of physical signals greatly, monitored signals can be converted into physical quantities by setting the channel’s own gain and offset.
Scope
The “X2C Scope” is a convenient visualisation tool for real time monitoring system
signals in an oscilloscope-like environment.
- Block input and output signals, global variables or even memory addresses can be monitored.
- No recompiling of the software is required to change the monitored signals — all changes in the settings can be made at runtime.
- All functionalities known from an oscilloscope are available, including various sampling and trigger modes.
- To ease interpretation of physical signals greatly, monitored signals can be converted into physical quantities by setting the channel’s own gain and offset.





